-
-
 Forklift handling mobile robot
Forklift handling mobile robot Reach mobile robots
Reach mobile robots SLIM
SLIM Jacking robot
Jacking robot Cooperation robot
Cooperation robot Roller mobile robot
Roller mobile robot Towing mobile robot
Towing mobile robot Platform handling robot
Platform handling robot Heavy-load robot
Heavy-load robot Outdoor loading mobile robot
Outdoor loading mobile robot Pick robot
Pick robot Parking robot
Parking robot Agricultural robot
Agricultural robot Driverless Road Roller robot
Driverless Road Roller robot Driverless Sanitation vehicle
Driverless Sanitation vehicle
































Ko Cong - Embodied Consciousness ②
In the wave of rapid development of intelligent robots, Kexiong officially announced its entry into the embodied intelligence industry and has fully launched efforts in the research and development of key core components of robots.
As the second major product of the foot-type robot controller, Kexiong has launched the JRD series of robot joint modules. The first product, JRD2100-T, was immediately recognized by many manufacturers upon its debut due to its high integration and excellent performance.
In the future, Kexiong will continue to launch more core products of embodied intelligence, constantly injecting new impetus into the industry.
Highly integrated · Ultra-precise
The JRD2100-T adopts an integrated and highly integrated design, integrating the reducer, motor and motor driver. Each module has a compact structure and is easy to install and disassemble, significantly enhancing the assembly efficiency of the entire machine and the reliability of the system.

What is particularly noteworthy is that this module is specifically designed for key motion joints such as elbows, arms, and shoulders. The modular configuration makes the robot's power system more flexible and versatile, enabling it to express a wider range of movements.

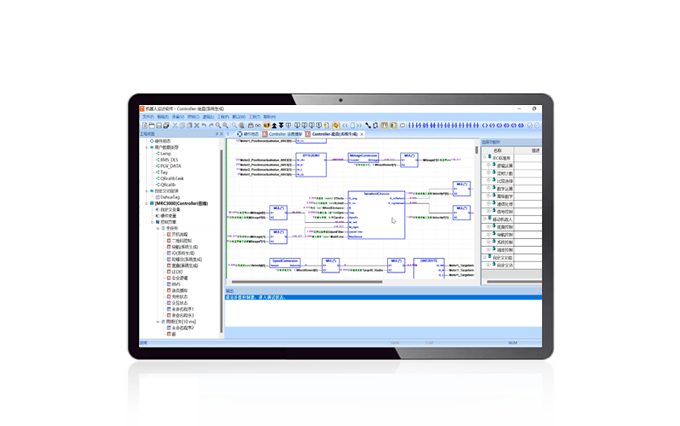
Intelligent Control · Precise Collaboration
Through the dual encoder closed-loop control system, the speed loop, torque loop, position loop and MIT hybrid control are realized to ensure that every movement is "intentional and effortless".
At the same time, it supports the CANFD high-speed communication protocol, enabling real-time collaboration among multiple modules and ensuring efficient operation without any strain.
The multiple safety protection mechanisms include: overcurrent, overvoltage, undervoltage, overspeed, overtemperature and other monitoring functions, ensuring that the equipment remains stable and intact under various extreme working conditions.

Technical Highlights · Clear and Intuitive
01.Hollow wiring design:The wiring is more flexible and the structure is more aesthetically pleasing.
02.Centralized winding process:Improve the filling rate of the tank and the torque density, further releasing the potential of power
03.The classic score slot is designed in conjunction with the optimal extreme slot.:Effectively reduce the amplitude and fluctuation of cogging torque to ensure smooth operation
04.Planetary reducer drive:High load-bearing capacity, long service life, precise and stable
05.High-integration FOC drive solution:High efficiency and energy conservation, rapid response
06.High-precision multi-turn absolute position encoder:Millimeter-level positioning accuracy
07.Compact in size and lightweight in weight:More suitable for humanoid and collaborative robots
08.Low noise and low vibration operation:Adapt to complex and quiet environments

Parameter information
| Reduction ratio | 36 | Rated voltage | 48 V |
| Rated phase current | 3.8 A | Rated power | 135 W |
| Rated rotational speed | 77 RPM | Rated torque | 12 Nm |
| Peak rotational speed | 87 RPM | Peak phase current | 12 A |
| Peak torque | 36 Nm | Average efficiency of the motor | 72% |
| Torque constant | 2.8 Nm/A | Reducer backlash | 8 Arcmin |
| Communication method | CAN FD | Baud rate communication | 500K-5M |
| Encoder | Dual coding 21 bits | - | - |

The future is promising. Act now.
The JRD series will continue to expand its product range, covering more types of joints, and fully support the deep implementation of the new generation of embodied intelligent robots in various scenarios such as medical rehabilitation, industrial collaboration, and educational services.


