-
-
 Forklift handling mobile robot
Forklift handling mobile robot Reach mobile robots
Reach mobile robots SLIM
SLIM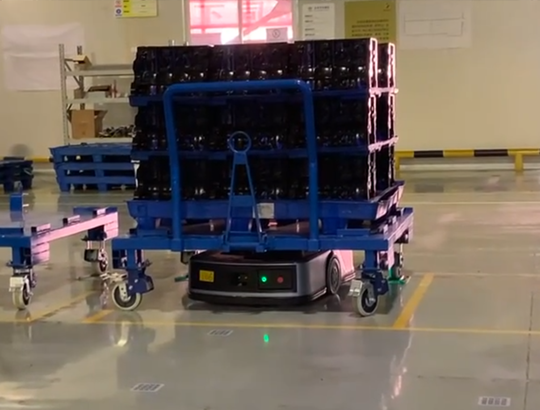 Jacking robot
Jacking robot Cooperation robot
Cooperation robot Roller mobile robot
Roller mobile robot Towing mobile robot
Towing mobile robot Platform handling robot
Platform handling robot Heavy-load robot
Heavy-load robot Outdoor loading mobile robot
Outdoor loading mobile robot Pick robot
Pick robot Parking robot
Parking robot Agricultural robot
Agricultural robot Driverless Road Roller robot
Driverless Road Roller robot Driverless Sanitation vehicle
Driverless Sanitation vehicle


































Introduction to the plan
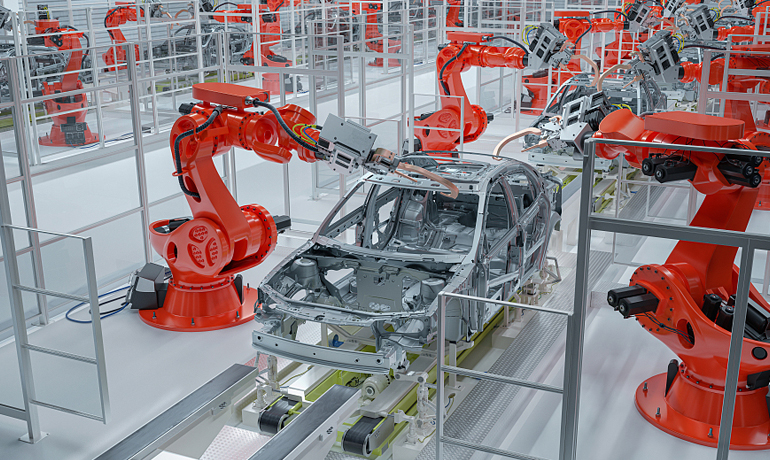
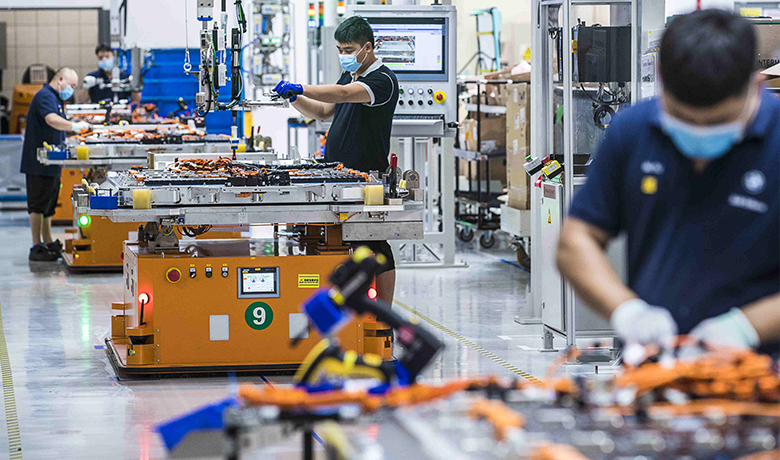
Cooperation mobile robots in the unmanned handling chassis based on the addition of a robotic arm can complete the material in the mobile robot and equipment between the machine loading and unloading work, but also through the vision sensor on the arm of the material all-round detection.
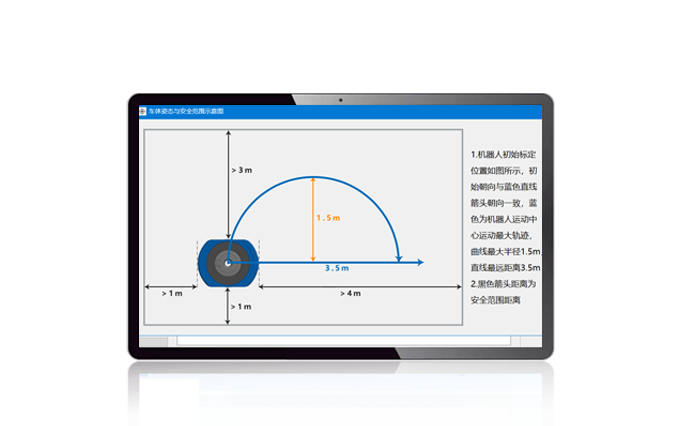
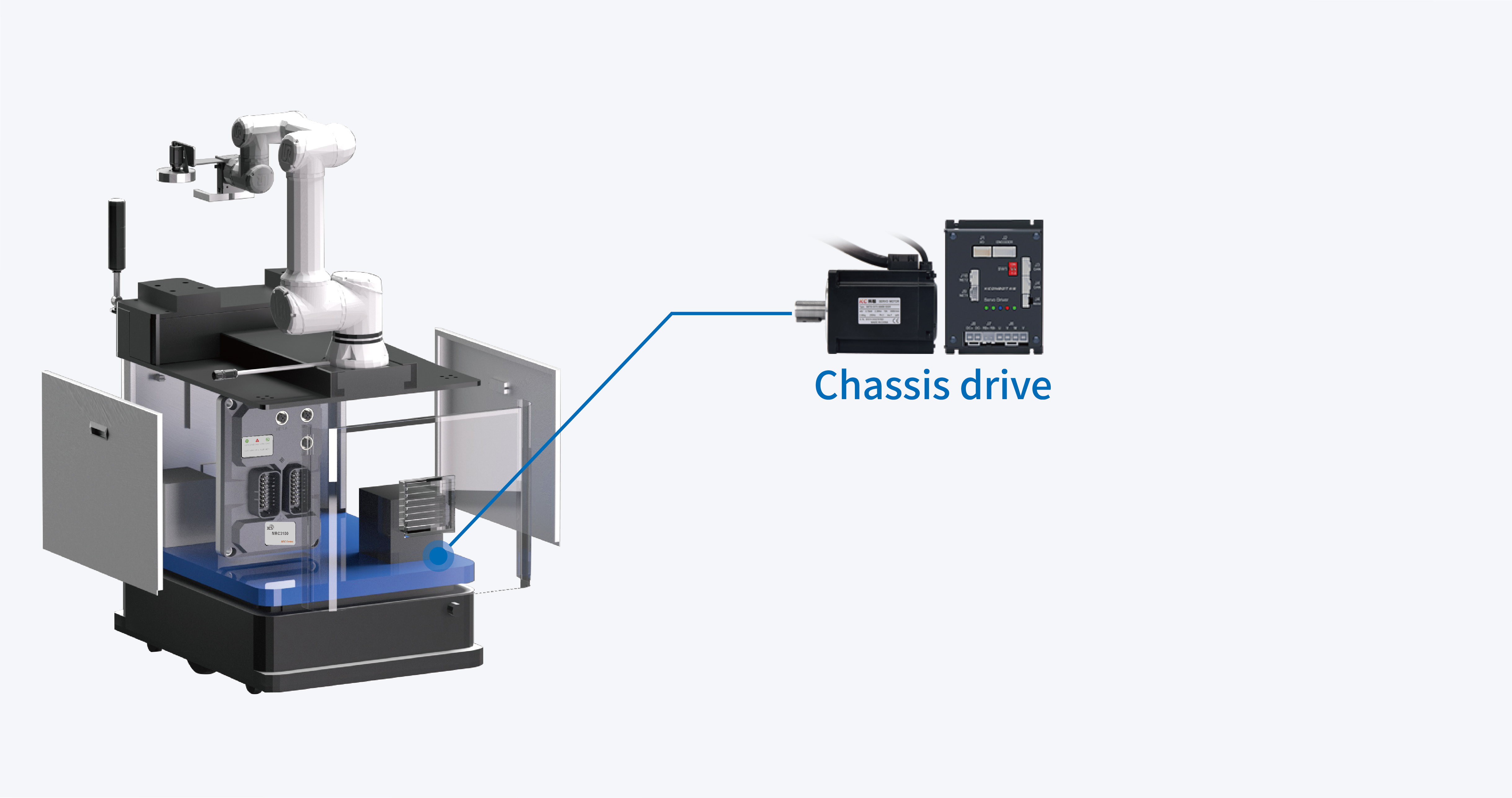
The cooperation mobile robot's overall solution, according to the mobile robot vehicle function, is mainly divided into the control system, navigation sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and optional functions, such as nine unit module composition.
The cooperation mobile robot's overall solution, according to the mobile robot vehicle function, is mainly divided into the control system, navigation sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and optional functions, such as nine unit module composition.
Plan composition


Universal mobile robot controller

Differential mobile robot controller

Barcode navigation dedicated controller
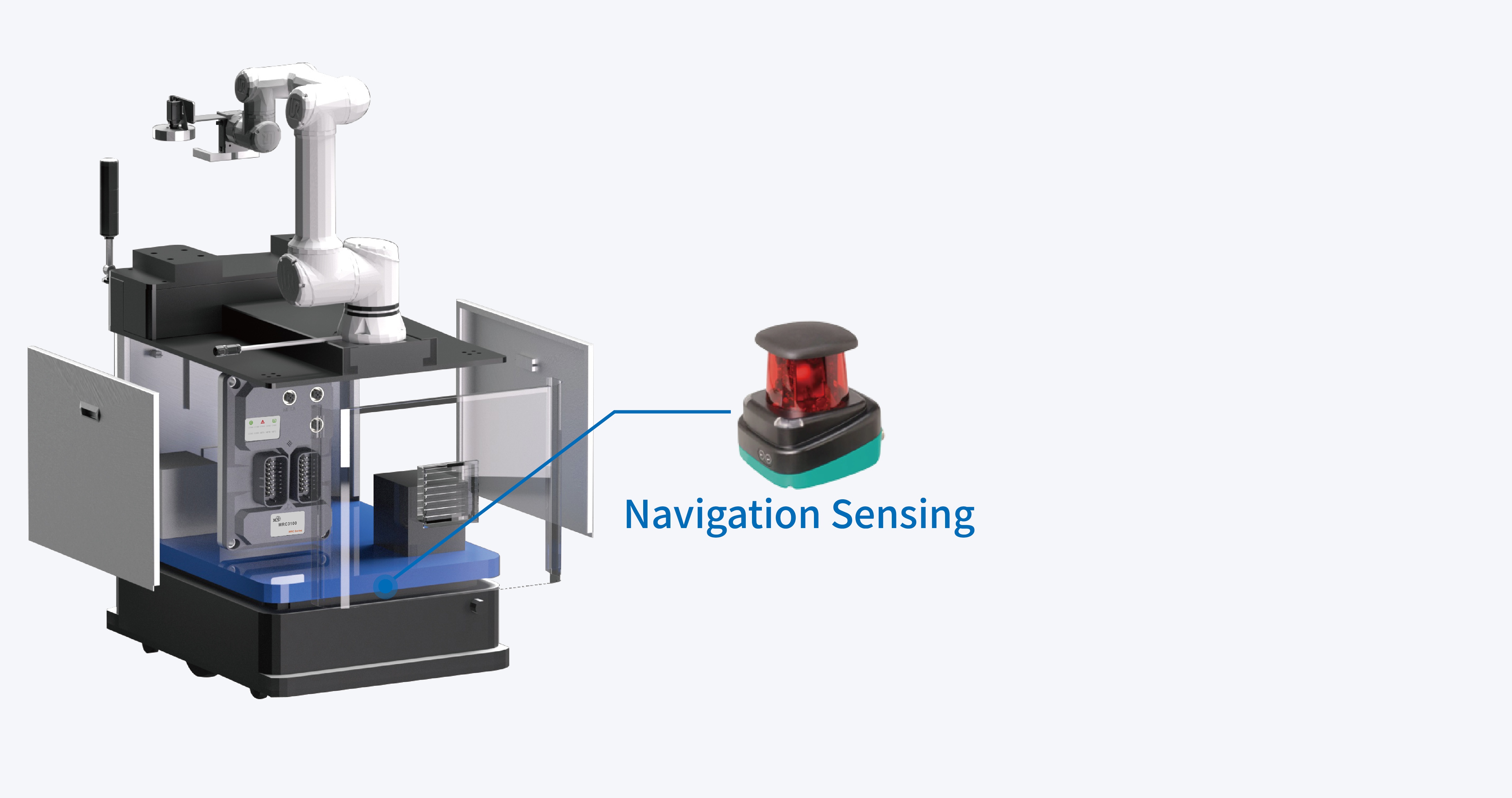

Laser sensor
Laser sensor

QR code camera

Diff wheel

Mecanum wheel
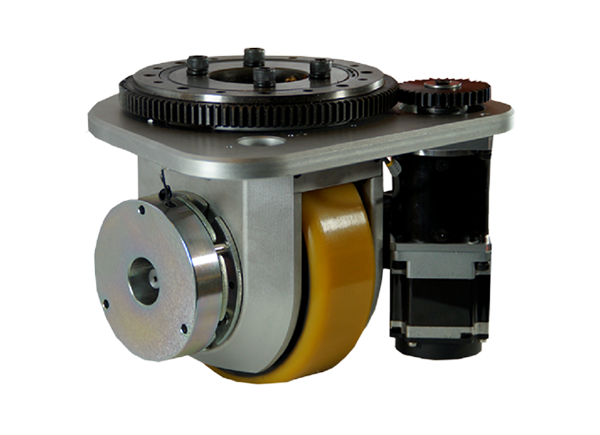
Steer drive wheel

Drive

Servo motor


Robotic arm
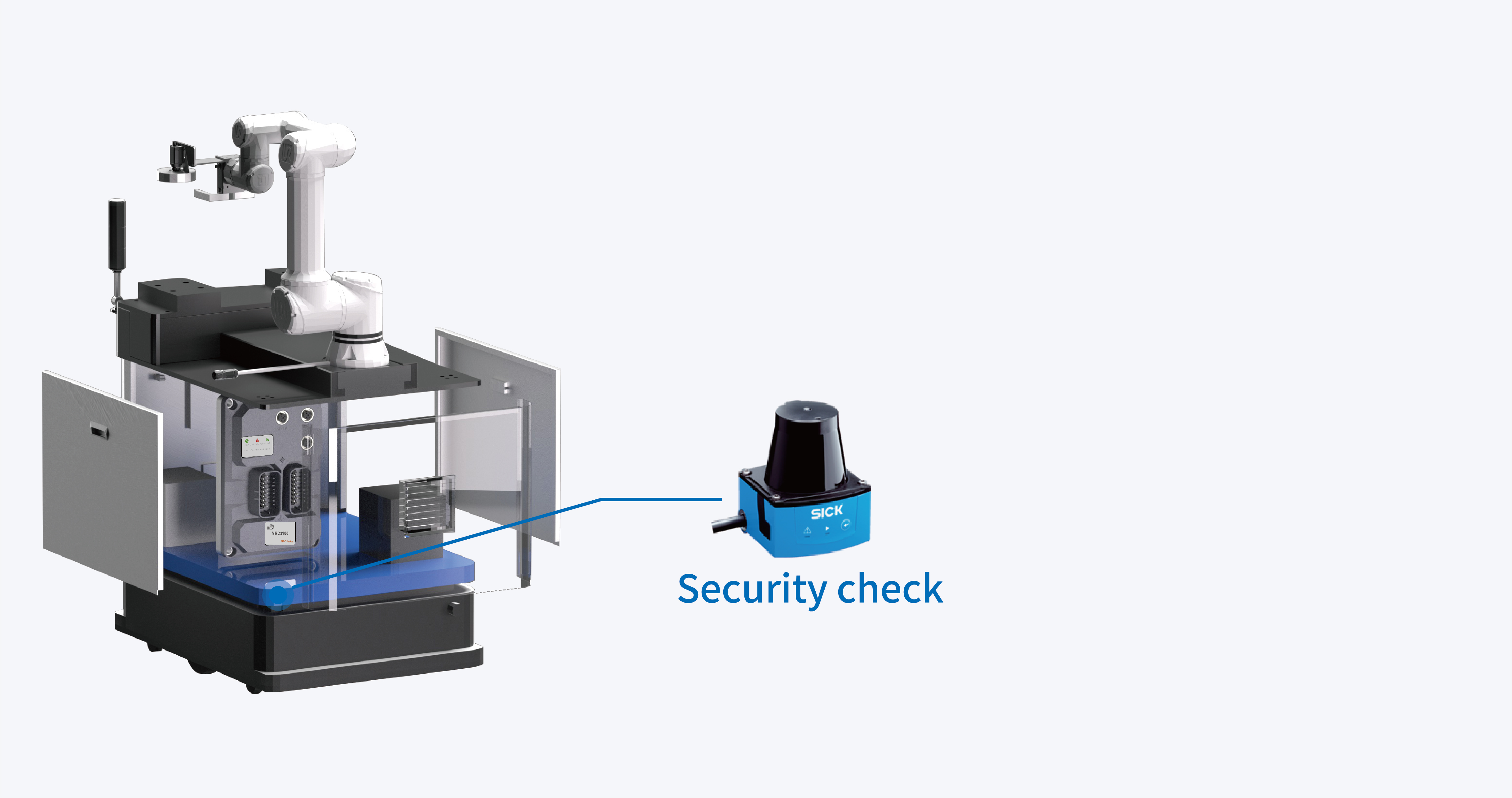

Obstacle avoidance laser

Visual obstacle avoidance
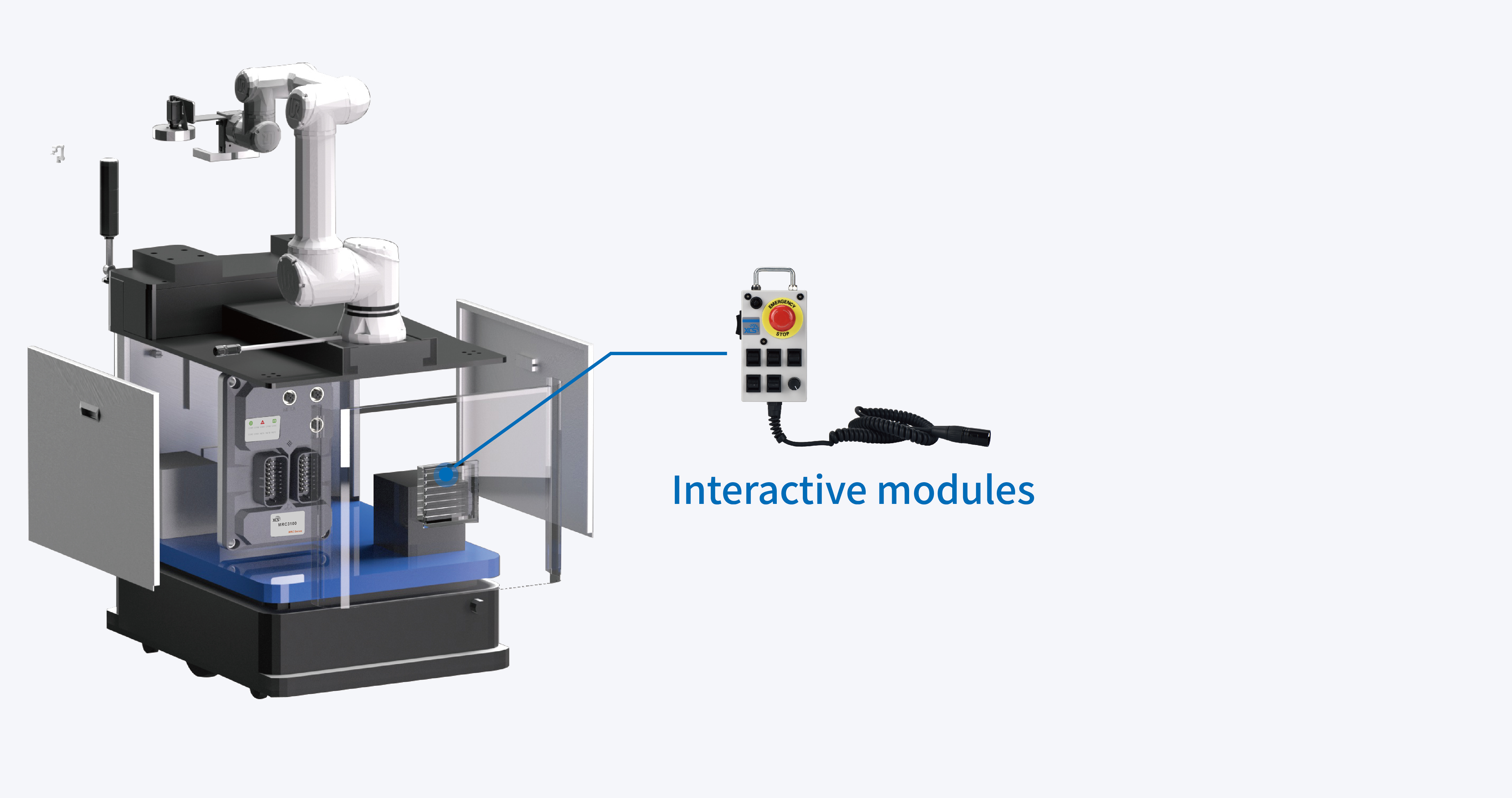

Hand-held remoter

Pager

Screen/display

Light

Switch


Wireless client

Battery

Power supply battery


二维码相机

视觉避障模块

双目摄像头
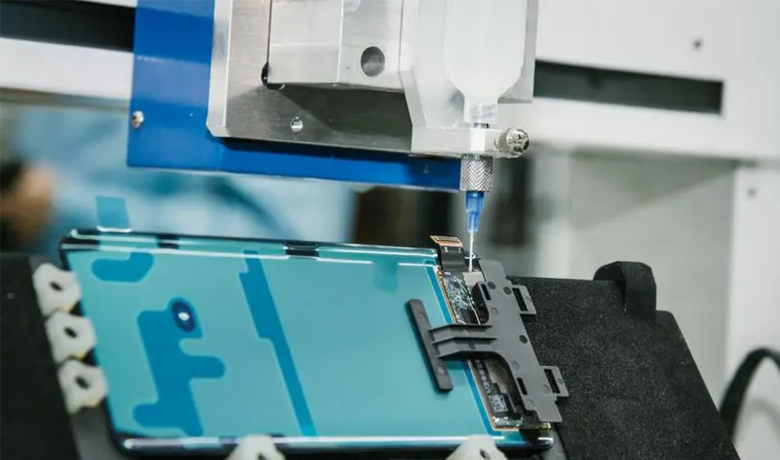
Related Cases
Cooperation robot
Navigation methods:Laser(natural)navigation
Chassis: 2WD diff
Navigation accuracy:±5mm
Chassis: 2WD diff
Navigation accuracy:±5mm

© 2023 Zhejiang KeCong Control Technology Co., Ltd .All rights reserved. |Let mobile robot service human beings Zhejiang police No.33052302000842
sitemap.xml