-
-
 Forklift handling mobile robot
Forklift handling mobile robot Reach mobile robots
Reach mobile robots SLIM
SLIM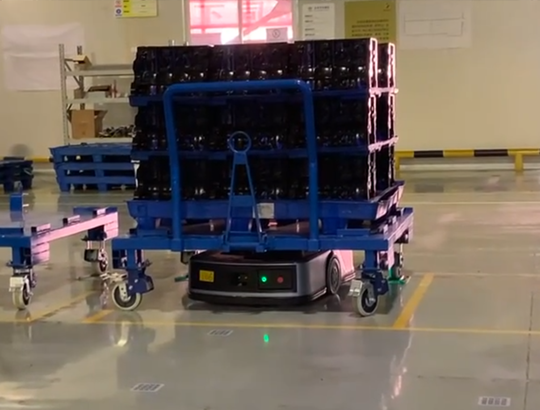 Jacking robot
Jacking robot Cooperation robot
Cooperation robot Roller mobile robot
Roller mobile robot Towing mobile robot
Towing mobile robot Platform handling robot
Platform handling robot Heavy-load robot
Heavy-load robot Outdoor loading mobile robot
Outdoor loading mobile robot Pick robot
Pick robot Parking robot
Parking robot Agricultural robot
Agricultural robot Driverless Road Roller robot
Driverless Road Roller robot Driverless Sanitation vehicle
Driverless Sanitation vehicle


































Introduction to the plan
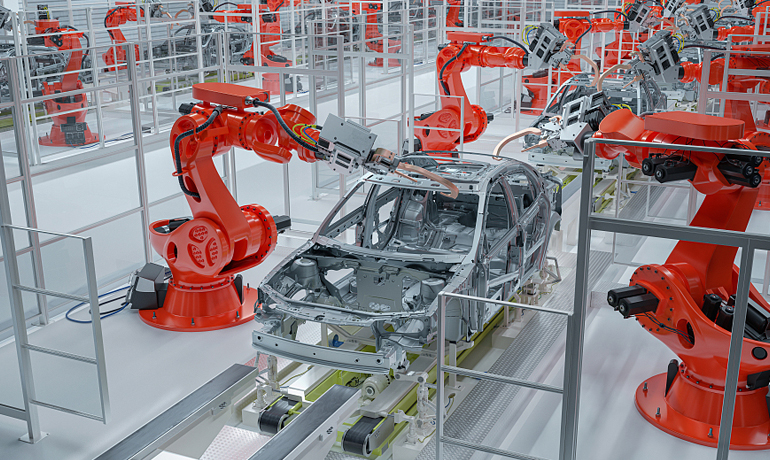
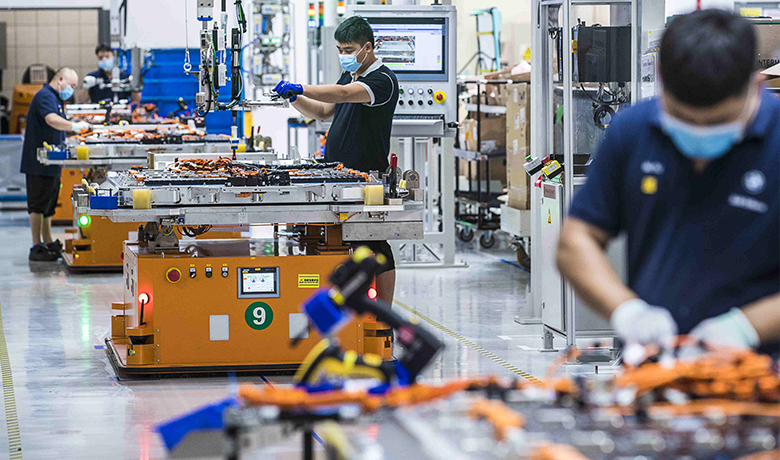
Fork mobile robots are suitable for loading, unloading, stacking, and transporting pallet goods of different heights. It can complete a series of actions, such as lifting, carrying, and transporting palletized goods without additional special carriers, to realize less labour force and automatic logistics on the factory.
The overall solution of fork-type handling mobile robot is mainly divided into nine modules according to the whole vehicle function of the mobile robot, such as control system, navigation and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and optional functions.
The overall solution of fork-type handling mobile robot is mainly divided into nine modules according to the whole vehicle function of the mobile robot, such as control system, navigation and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and optional functions.
Plan composition
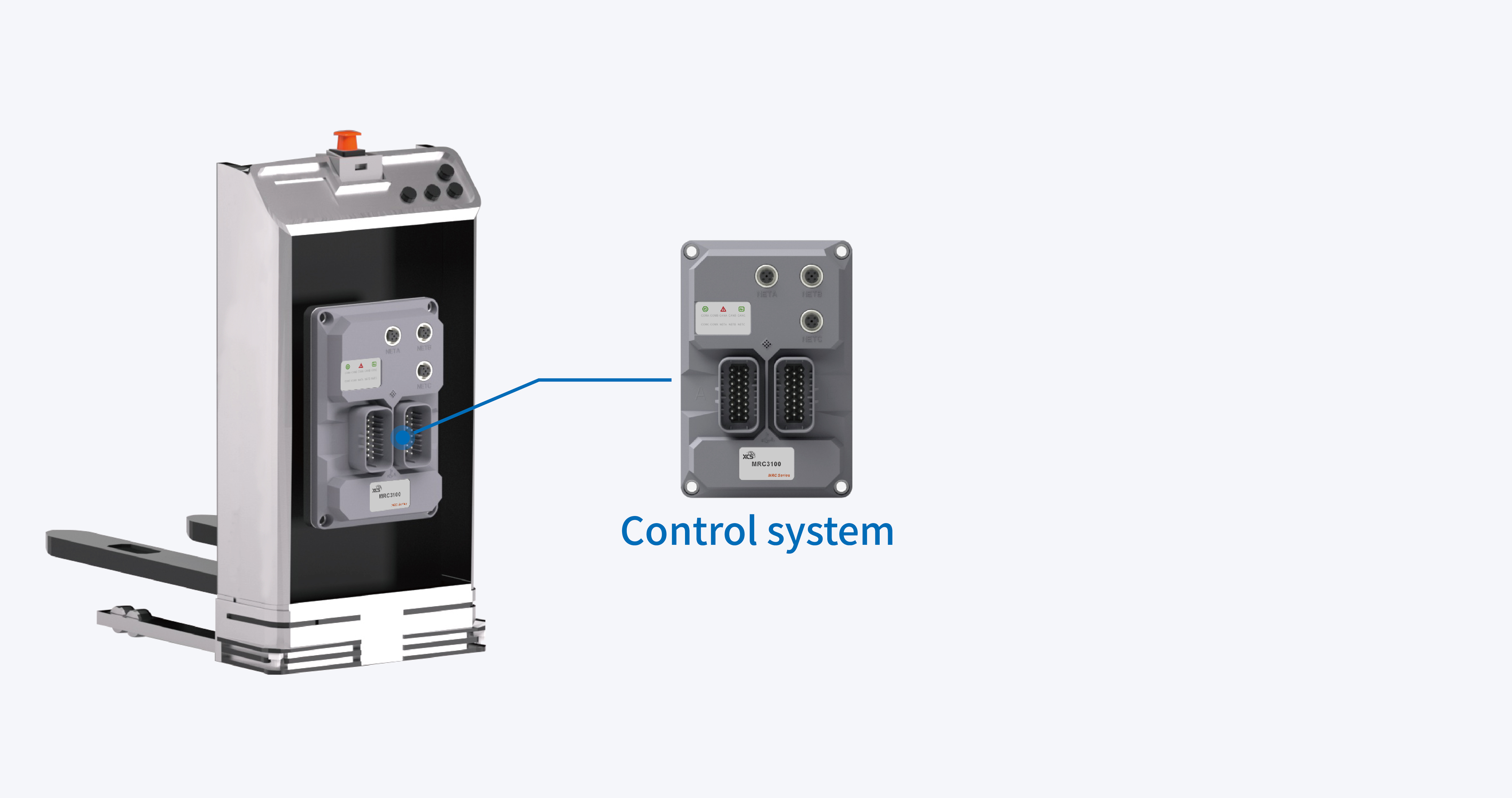

Universal mobile robot controller

Forklift robot controller
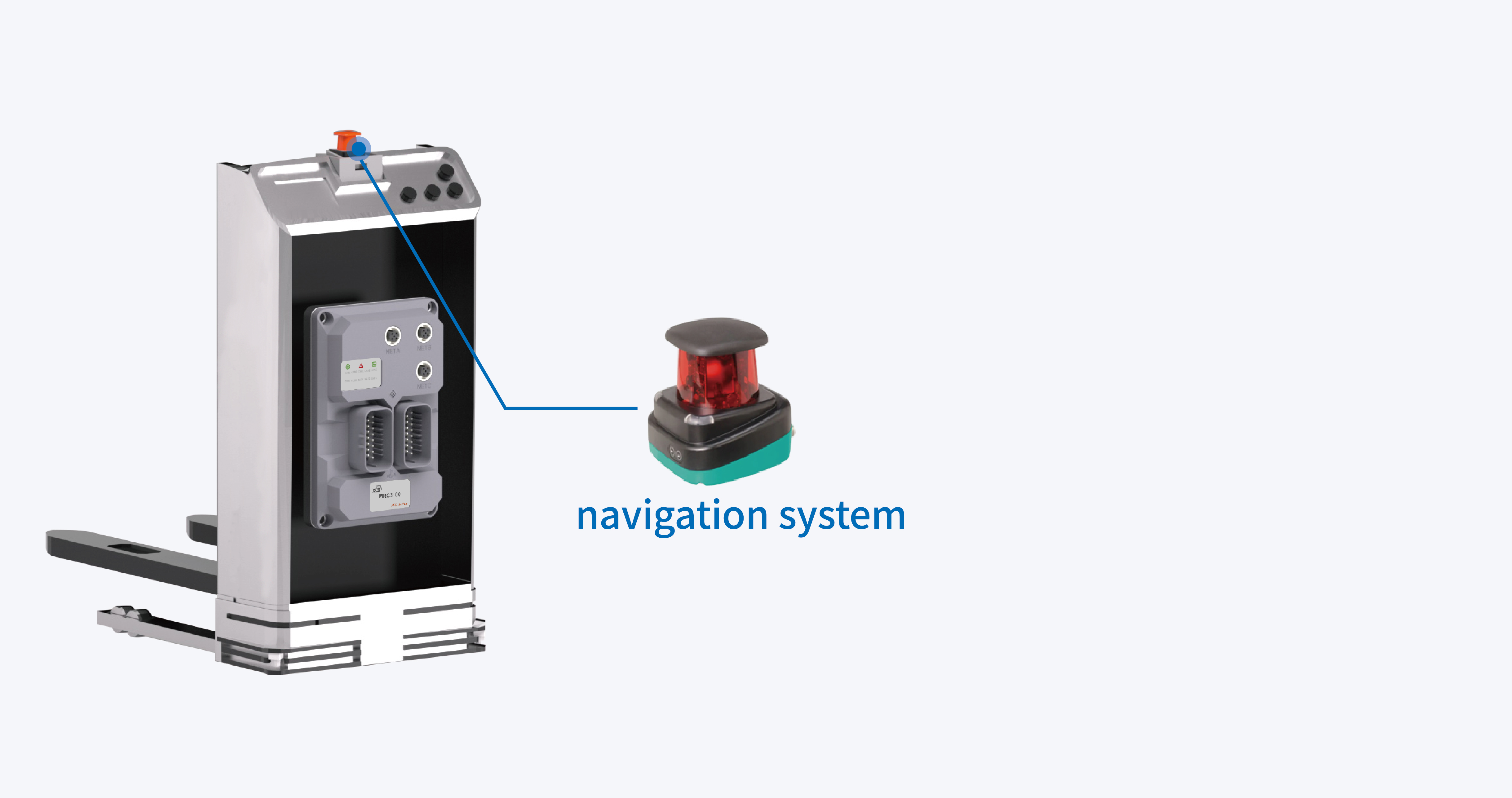

2D Laser rangefinder
3D laser sensor

Magnetic navigation sensor

Magnetic navigation sensor

RFID sensor

Steer drive wheel

Servo motor

Servo motor

Servo drive

Servo drive

Servo drive


Fork

Encoder convert module

Linear encoder

Absolute encoder

Linear encoder


Laser obstacle avoidance sensor

Laser sensor

Binocular camera


Wired hand-held remoter

Pager

Screen/display

Hand-held termina


Wireless client


Pallet recognition module

Depth camera
Related Cases
Forklift handling mobile robot
Navigation methods:Laser
Chassis: Single S/D
Navigation accuracy ±5mm
Chassis: Single S/D
Navigation accuracy ±5mm
Reach mobile robots
Navigation methods:Laser
Chassis: Single S/D
Navigation accuracy:±5mm
Chassis: Single S/D
Navigation accuracy:±5mm
SLIM
Navigation methods:Laser
Chassis: Single S/D
Navigation accuracy:±5mm
Chassis: Single S/D
Navigation accuracy:±5mm
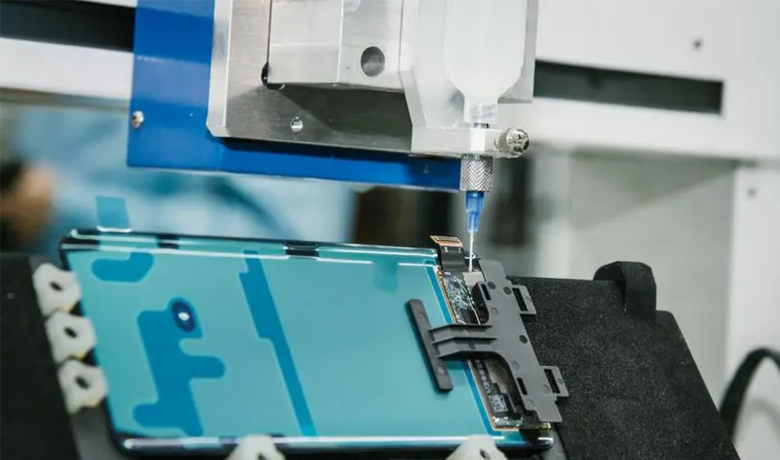
Related application scenarios

© 2023 Zhejiang KeCong Control Technology Co., Ltd .All rights reserved. |Let mobile robot service human beings Zhejiang police No.33052302000842
sitemap.xml