-
-
 Forklift handling mobile robot
Forklift handling mobile robot Reach mobile robots
Reach mobile robots SLIM
SLIM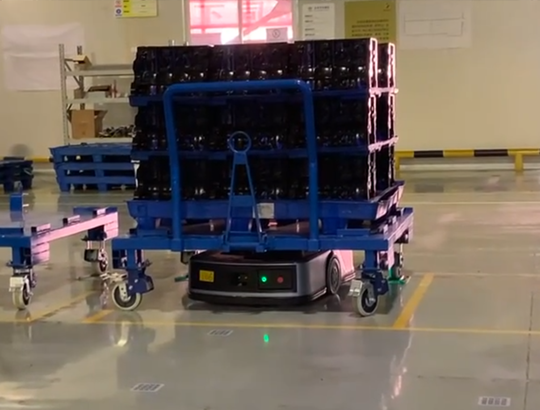 Jacking robot
Jacking robot Cooperation robot
Cooperation robot Roller mobile robot
Roller mobile robot Towing mobile robot
Towing mobile robot Platform handling robot
Platform handling robot Heavy-load robot
Heavy-load robot Outdoor loading mobile robot
Outdoor loading mobile robot Pick robot
Pick robot Parking robot
Parking robot Agricultural robot
Agricultural robot Driverless Road Roller robot
Driverless Road Roller robot Driverless Sanitation vehicle
Driverless Sanitation vehicle
































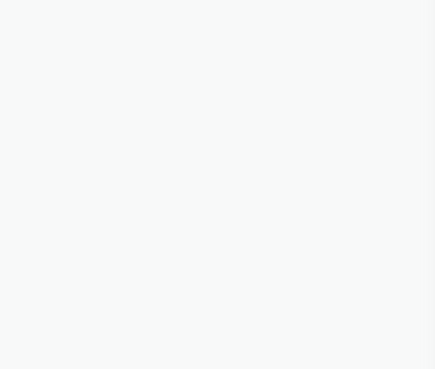















Model | FRC5000-L005 | FRC5000-L006 | FRC5000-L108 | FRC5000-H005 | FRC5000-H006 | FRC5000-H108 |
Description | Single-steering wheel laser navigation controller | Dual-steering wheel laser navigation controller | Four-steering wheel dedicated controller | Single-steering wheel 3D laser navigation controller | Dual-steering wheel 3D laser navigation controller | Four-steering wheel 3D laser navigation controller |
DimensionsW x H x D(mm) | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 |
Protection class | IP65 | IP65 | IP65 | IP65 | IP65 | IP65 |
Temperature | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ |
Humidity | 10%~90%RH no-condensing | 10%~90%RH no-condensing | 10%~90%RH no-condensing | 10%~90%RH no-condensing | 10%~90%RH no-condensing | 10%~90%RH no-condensing |
EMC | Ind Level 3 | Ind Level 3 | Ind Level 3 | Ind Level 3 | Ind Level 3 | Ind Level 3 |
IMU | √ | √ | √ | √ | √ | √ |
Differential Chassis Model | × | × | Four-differential assembly chassis | × | Dual-differential assembly chassis | Four-differential assembly chassis |
Steering Wheel Chassis Model | Single steering wheel | Dual steering wheels | Four steering wheels | Single steering wheel | Dual steering wheels | Four steering wheels |
Other Chassis Model | × | × | × | × | × | × |
Laser Nav | √ | √ | √ | √ | √ | √ |
QR Code Nav | √ | Optional | √ | × | × | × |
Magnet Nav | Optional | × | × | × | × | × |
Nav. Method | × | × | Hybrid navigation | GNSS navigation, hybrid navigation | GNSS navigation, hybrid navigation | GNSS navigation, hybrid navigation |
Nav. Accuracy | Laser natural navigation ±10mm, laser reflector navigation ±5mm, magnetic navigation ±10mm | Laser natural navigation ±10mm, laser reflector navigation ±5mm, magnetic navigation ±10mm | Laser natural navigation ±10mm, laser reflector navigation ±5mm, magnetic navigation ±10mm | 3D laser navigation ±10mm, GNSS navigation ±50mm, GNSS+3D laser hybrid navigation ±25mm | 3D laser navigation ±10mm, GNSS navigation ±50mm, GNSS+3D laser hybrid navigation ±25mm | 3D laser navigation ±10mm, GNSS navigation ±50mm, GNSS+3D laser hybrid navigation ±25mm |
Angle Precision | ±0.5° | ±0.5° | ±1° | ±1° | ±1° | ±1° |
Map Area | ≤400000㎡ | ≤400000㎡ | ≤400000㎡ | ≤400000㎡ | ≤400000㎡ | ≤400000㎡ |
CAN Ports | 3 | 3 | 3 | 3 | 3 | 3 |
RS485/RS232/RS422 Ports | 4/1/× | 4/1/× | 4/1/× | 4/1/× | 4/1/× | 4/1/× |
Multiplex Comm. Ports | 1 (Config CAN/RS485/RS232) | 1 (Config CAN/RS485/RS232) | 1 (Config CAN/RS485/RS232) | 1 (Config CAN/RS485/RS232) | 1 (Config CAN/RS485/RS232) | 1 (Config CAN/RS485/RS232) |
PWM Ports | 4 | 4 | 4 | 4 | 4 | 4 |
AI/AO | × | × | × | × | × | × |
DI/DO/DIO | 20/12/4 | 20/12/4 | 20/12/4 | 20/12/4 | 20/12/4 | 20/12/4 |
Encoder Ports | 2 | 2 | 2 | 2 | 2 | 2 |
Audio I/F | 1 | 1 | 1 | 1 | 1 | 1 |
Wired Industrial Ethernet | 3 | 3 | 3 | 3 | 3 | 3 |
Wireless Debug I/F | √ | √ | √ | √ | √ | √ |
Robot Design SW | √ | √ | √ | √ | √ | √ |
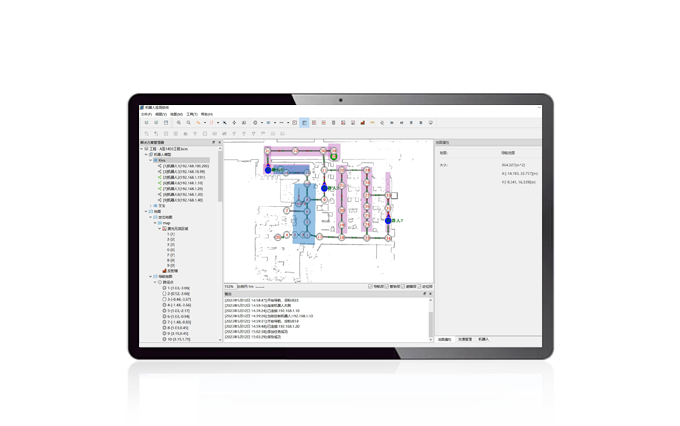
Robot App SW | √ | √ | √ | √ | √ | √ |
Robot Monitoring & Scheduling SW | Optional | Optional | Optional | Optional | Optional | Optional |
Expansion Features | Pallet recognition, visual positioning, fork recognition, landmark secondary positioning, navigation laser-assisted obstacle avoidance, 3D visual obstacle avoidance | Pallet recognition, visual positioning, fork recognition, landmark secondary positioning, navigation laser-assisted obstacle avoidance, 3D visual obstacle avoidance | Pallet recognition, visual positioning, fork recognition, landmark secondary positioning, navigation laser-assisted obstacle avoidance, 3D visual obstacle avoidance | Pallet recognition, fork recognition, landmark secondary positioning, navigation laser-assisted obstacle avoidance, 3D visual obstacle avoidance | Pallet recognition, fork recognition, landmark secondary positioning, navigation laser-assisted obstacle avoidance, 3D visual obstacle avoidance | Pallet recognition, fork recognition, landmark secondary positioning, navigation laser-assisted obstacle avoidance, 3D visual obstacle avoidance |
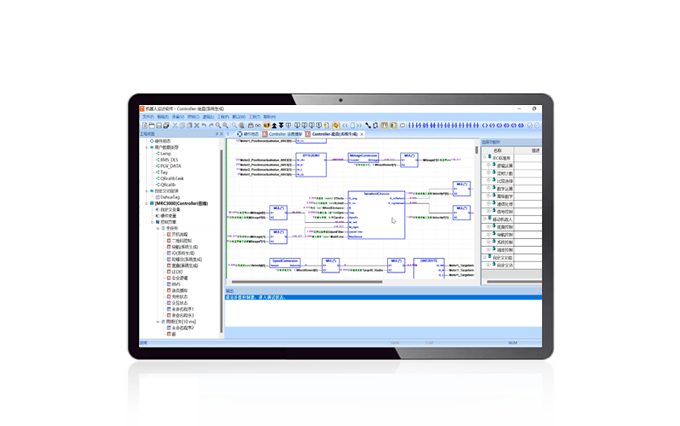


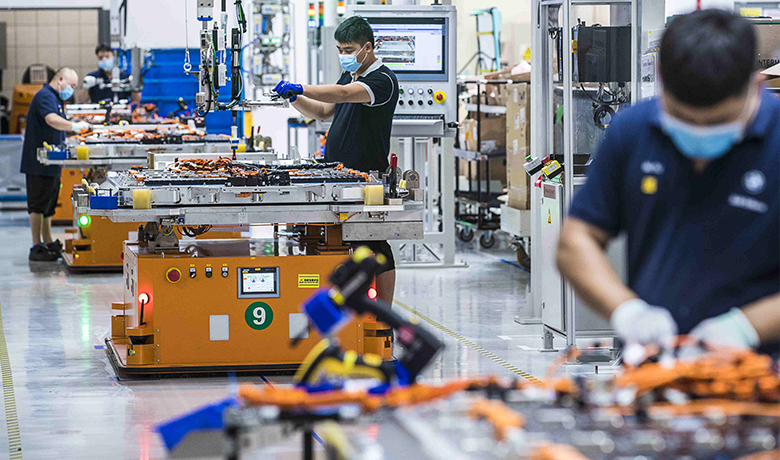
The overall solution of fork-type handling mobile robot is mainly divided into nine modules according to the whole vehicle function of the mobile robot, such as control system, navigation and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and optional functions.
